2024.11.12随笔
2024.11.12随笔
MicePapers Summary:
Fusing Global and Local Information Network for Tassel Detection in UAV Imagery
作者提到过去的三种玉米穗计数方法,分别是如下三种:
Faster R-CNN:用于检测玉米雄花,但由于其只利用单层特征映射,精度受限。
YOLOX:通过嵌入通道注意力来提高处理速度,但其对小物体的检测能力有限。
YOLOv5-Tassel:一种增强方法,结合浅层信息增强小物体感知,但结构复杂且参数较多。
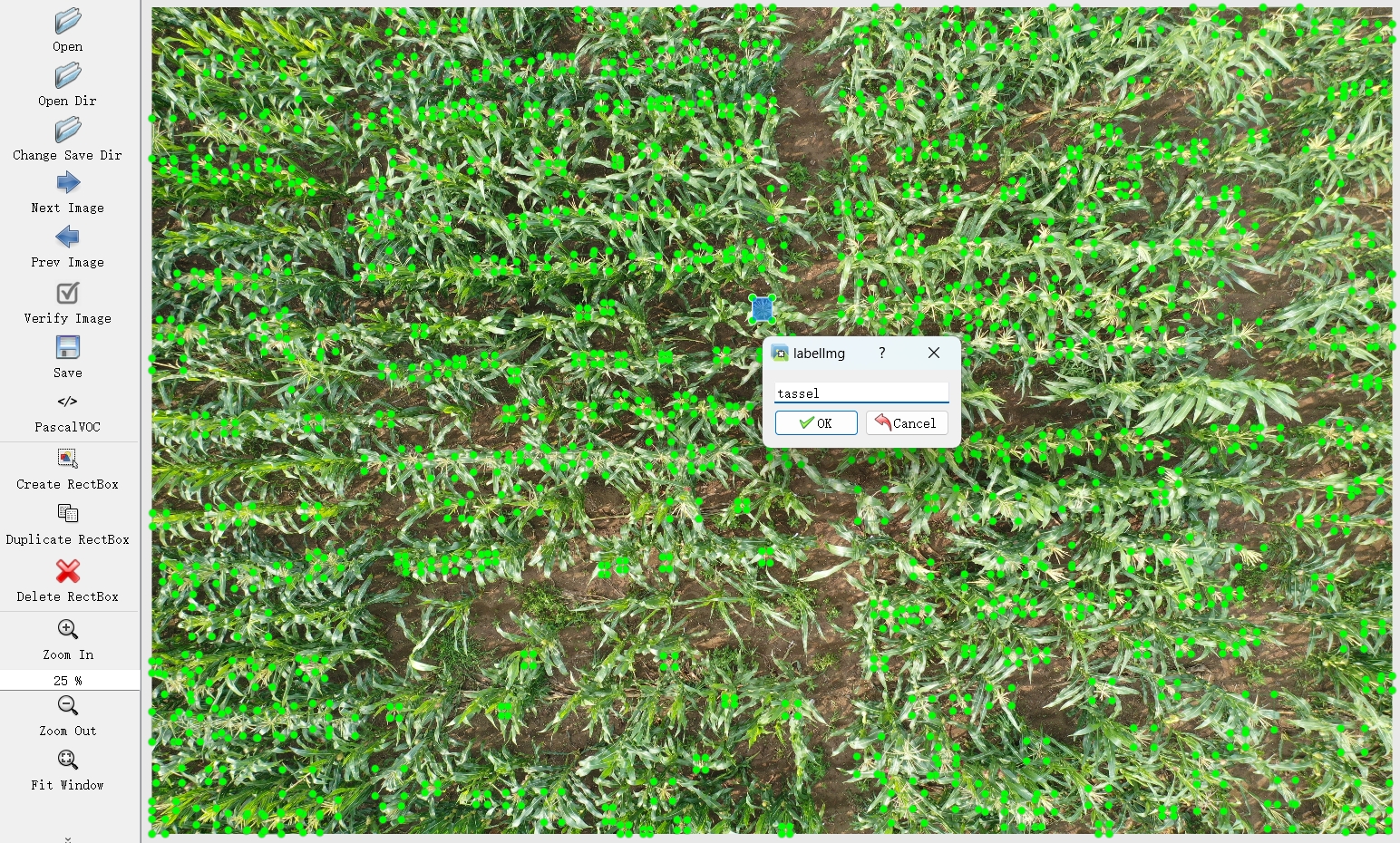
上述三种方法要么是为了提升速度却导致精度过低,要么就是为了增强精度使得消耗资源过多速度太慢,为了解决这个问题,作者提出并公开了一种网络架构FGLNet,并基于Lu等人的点标注数据集MTC-UAV,主动为其增加了边框标注,并将其命名为玉米雄花检测与计数数据集MTDC-UAV。该数据集现已公开发布。
MTDC-UAV 数据集是基于原始的 MTC-UAV 数据集扩展而来,用于玉米雄花的检测与计数。原 MTC-UAV 数据集中包含 306 张图像,作者从中抽取了 106 张保留点标注用于计数测试,并将它们存放在 Counting 文件夹中。剩余的 200 张图像则被四等分生成 800 张子图,并重新进行了框标注,其中前 500 张作为训练集,后 300 张作为检测测试集,存放在 Detection 文件夹中。
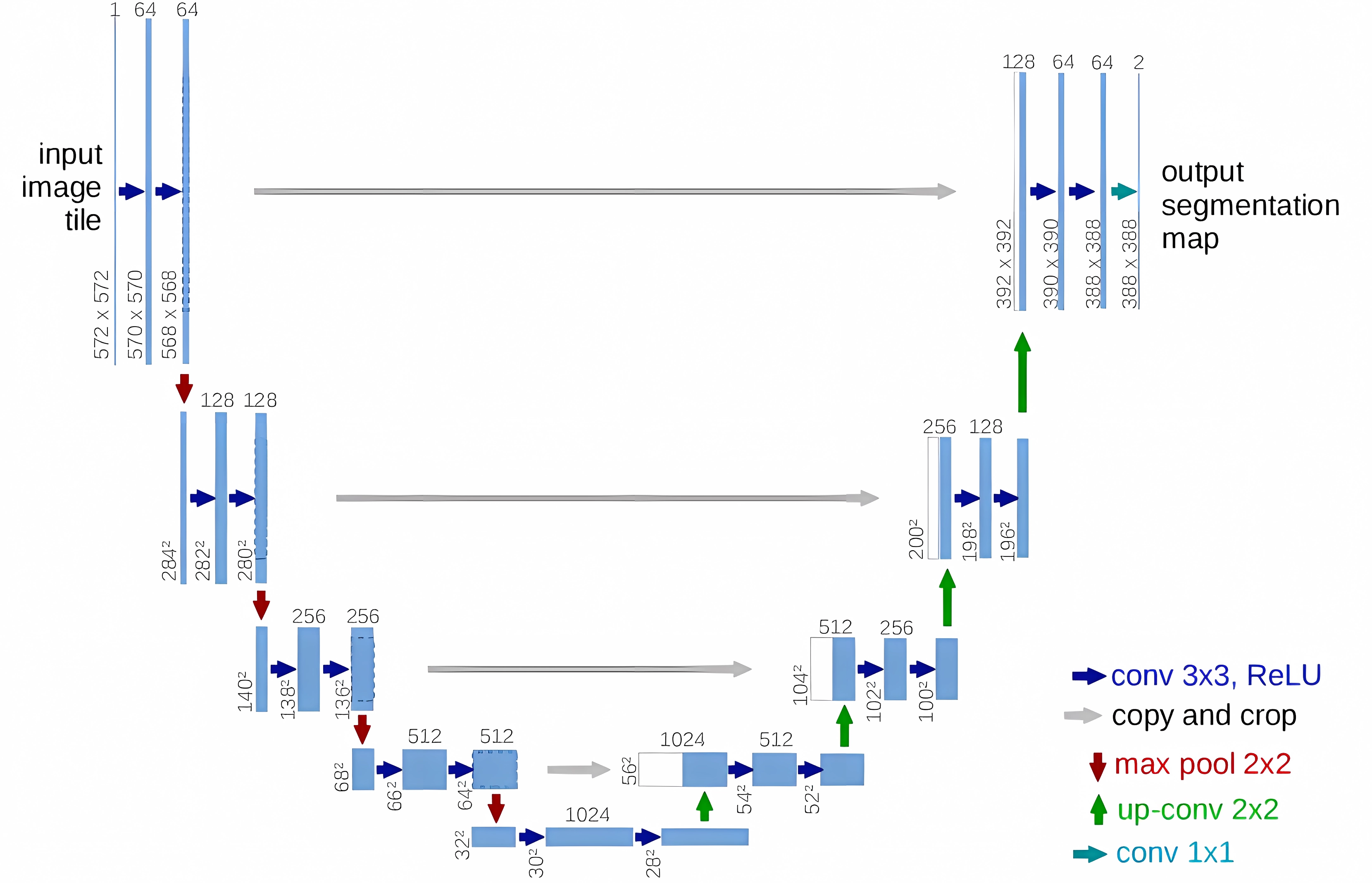
FGLNet 采用了特征金字塔结构,通过在不同层级的特征图(如C2、C3、C4)上提取信息,实现对各种尺度的目标进行检测。这种多尺度特征融合方式有效提升了小目标的检测精度,尤其适用于复杂场景中的细节捕捉。
在FGLNet中,为了高效结合全局与局部信息,模型使用了CSPDarknet作为特征提取骨干网络,并引入了G-Fusion模块用于全局信息的提取。通过对多尺度特征图(C2、C3、C4)的加权平均和对齐,该模块在保持计算效率的同时,增强了对细节的捕捉。随后,利用Inject模块,通过注意力机制将全局与局部信息进一步融合。
最后,FGLNet的损失函数包含两部分:分类损失和定位损失。分类损失采用二元交叉熵损失(BCE)来评估类别匹配的准确性,定位损失则使用完整IoU(CIoU)来精确测量预测框与真实框之间的距离、面积和形状差异。这种设计提高了FGLNet在目标检测和定位上的表现,有助于更准确地识别和计数作物花序。
实验与分析:
实现细节:FGLNet在相同配置下训练和测试,基于PyTorch并用CUDA加速。图像缩放到1216像素,使用COCO上预训练的CSPDarknet作为骨干网络。优化器采用AdamW,学习率为0.002,批量大小为4,训练150轮,并应用数据增强以防过拟合。
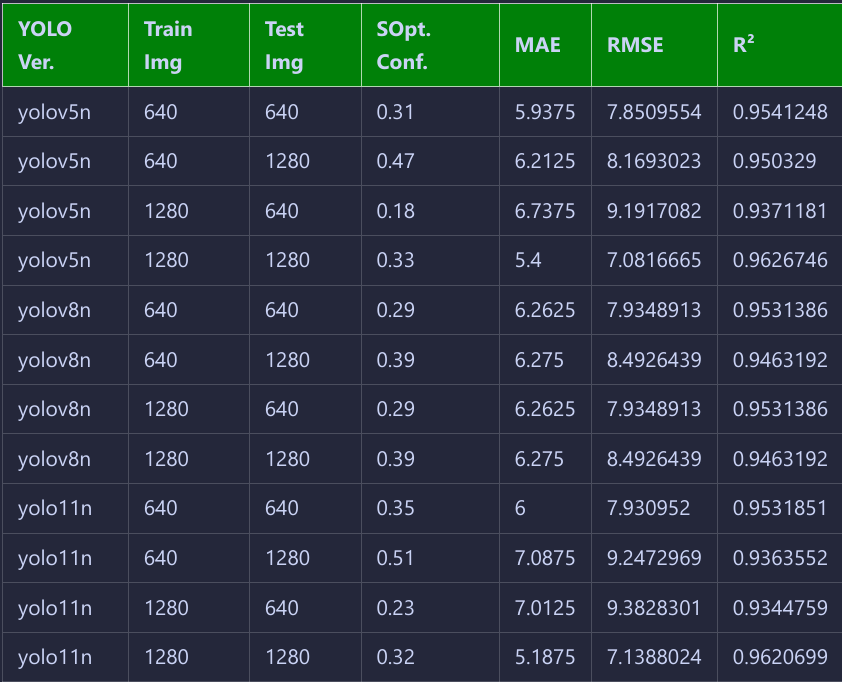
评价指标:检测性能通过精确率 (P)、召回率 (R)、AP50和AP50-95来评估,以衡量模型的定位与分类能力。
对比结果:FGLNet优于Faster R-CNN、FCOS、Yolov8、WheatLFANet和TasselLFANet,尤其在小物体检测上表现出色,主要得益于其更大特征图与全局-局部信息融合的架构设计。
计数实验与可视化:
在106张MTDC-UAV图像上进行计数评估,并与TasselNetV2进行比较。结果显示,FGLNet在计数精度和鲁棒性上优于其他方法,参数规模为0.77M,紧随其后的是WheatLFANet。Faster R-CNN在计数性能上表现较差,主要由于信息丢失,无法有效适应UAV图像。尽管提高分辨率有助于性能提升,但会带来较高的计算成本。通过使用特征金字塔网络(FPN)可进一步优化性能。